
 产品:64
产品:64
 联系我们
联系我们

主营ABB、库卡KUKA、安川YASKAWA、发那科FANUC、欧地希OTC、川崎Kawasaki、遨博AUBO、现代HYUNDAI、电装DENSO、欧姆龙OMRON、爱普生EPSON等进口***机器人项目集成、机器人代理、机器人配件、机器人售后维保、机器人培训一站式服务。
地址:上海市嘉定区博园路1333号1栋7层(19921272665)
ABB机器人变位机如何去进行校准与设置
声明:本媒体部分图片、文章来源于网络,
版权归原作者所有,如有侵权,请与我联系删除
我们在选择ABB机器人的时候也会选择一些外围设备,像一些工装夹具,变位机之类的,一边变位机也都是需要和机器人进行设置,像ABB这类的厂家也都会存在有变位机,ABB机器人与ABB变位机一般工人不清楚校准的的步骤,今天本文主要以ABB机器人变位机为例来说一下较为设置的步骤都有哪些。
设置前,要先建立准确的tool数据(TCP),设置过程中使用正确的tool。设置步骤如下:
1)进入手动操纵界面,选择正确的工具坐标
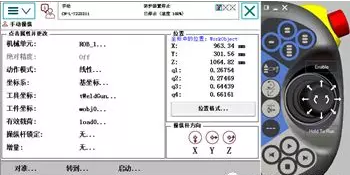
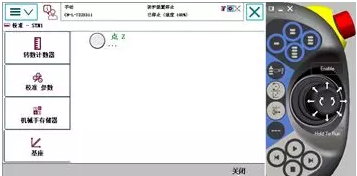
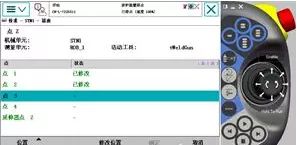
2)进入校准,选择变位机,选择“基座”(BASE)
ABB机器人线缆
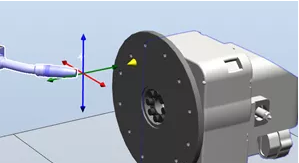
3)移动机器人工具至变位机旋转盘上一标记处,并点击“修改位置”记录位置。
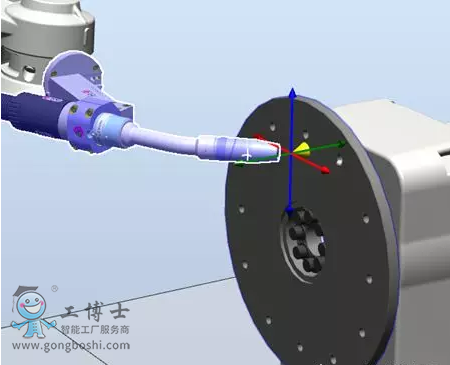
ABB机器人售后与维修 4)旋转变位机一定角度(比如45°),再次移动机器人工具至变位机旋转盘上标记处,并点击“修改位置”记录第二个位置。
ABB机器人售后与维修
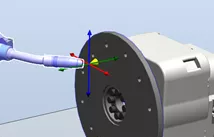
5)同理记录点3和点4。
6)移动机器人离开变位机并记录为延伸器点Z(该操作仅设定变位机base的z的正方向)。完成所有记录点击“确定”,完成计算。
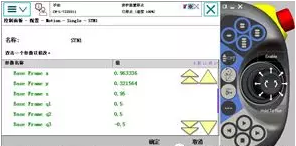
7)可以进入示教器-控制面板-配置-主题motion,single下看到ABB机器人线缆变位机的Base相对于world坐标系的关系。
8) 在手动操纵界面,选择工件坐标并新建一个工件坐标系,修改该坐标系的ufprog为false(及u
通过本文希望能够帮助到大家文章中如有不准确的地方希望大家指正,如果有更多的机器人咨询可以与我们技术联系。
更多咨询:ABB机器人
